Electric Skateboard with Weight Difference Sensing
Electric skateboards are not uncommon, and hand based throttle systems make up the majority of eboards on the market. While some eboards have an acceleration switch on the board that is activated by stepping on it, the weight-difference-sensing eboard design featured here offers advantages over the typical foot-actuated design. By sensing weight difference instead of simply having an acceleration switch, it allows the rider to accelerate and decelerate without modifying stance. This weight sensing feature allows for a more intuitive and smooth riding system as well as faster actuation time for acceleration and deceleration. In addition, right-left weight distribution can be used to control left-right motor speed to facilitate turning cleanly and sharply at high velocities speed while maintaining four wheel contact with the ground.
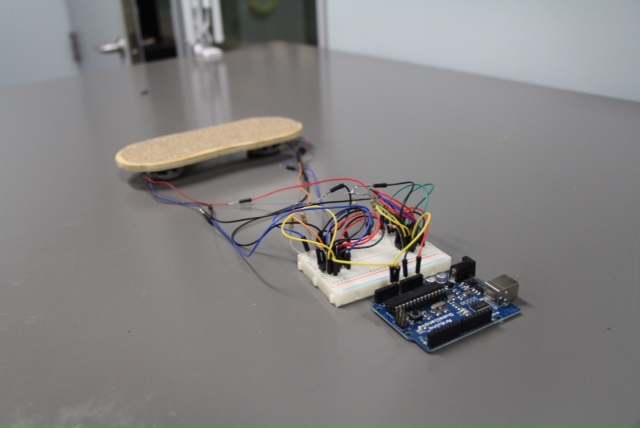
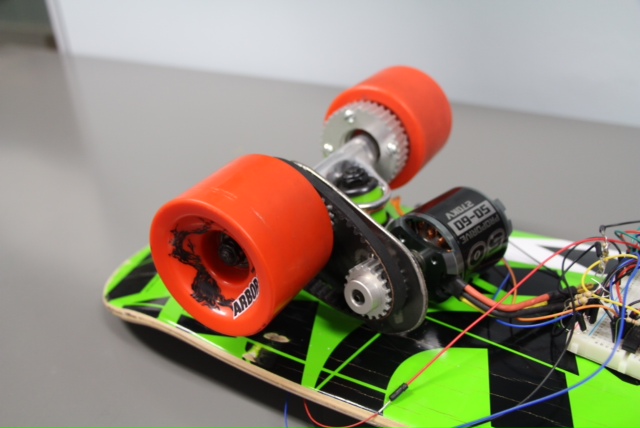
For this project I converted a skateboard into a dual motor electric skateboard that is controlled by sensing weight distribution in four directions: forward, backward, right, and left. I accomplished this by mounting two brushless motors to the rear wheels and running their individual electronic speed controls through an arduino board. The board now receives input from four individual load sensors at the heel and toes of a typical regular stance on the board. The arduino receives information from each of the sensors and calculates the difference between the left-right sensors and the front-back sensors. From there it sends information to the individual motors about how quickly to accelerate.